
SLAM is at the heart of many of 2019’s greatest 3D technology innovations. Here’s another: NavVis has announced a software release for its M6 indoor mobile mapping system that automatically removes two kinds of point cloud artifacts, resulting in overall cleaner data.
For this release, NavVis has targeted two kinds of point cloud artifacts. First, fringe points, which result when a single laser beam hits the edge of an object as well as its background. This scatters the beam, generating a less than clean edge to the scanned object. The second is the weird data that results when a dynamic object—like a human—moves through your scan.
NavVis notes that the fringe-removal techniques used in the past have produced less than optimal results, so the company opted to exploit its SLAM technology to improve the data. The idea: since the SLAM device is constantly recording information about its position, it is able to take multiple “observations” of the captured area, compare them precisely, and then calculate the probability that each point exists in reality.
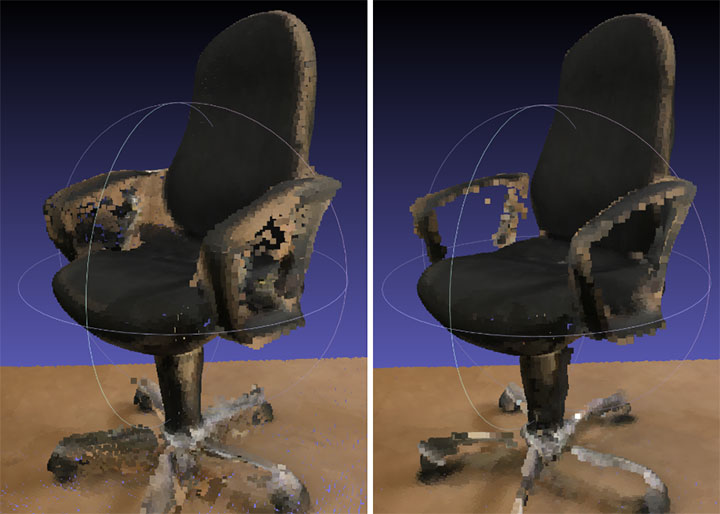
“If you hit the front of the chair ten times and three times it passes through,” says NavVis’ CTO Dr. Georg Schroth, “you know that’s probably really the chair. If you hit something three times, and ten times you go through in space, then you can remove this. So ultimately that’s why we call it a probabilistic point cloud.”
The same goes for the artifacts created by people moving through your scan.

A person moving through a scan.
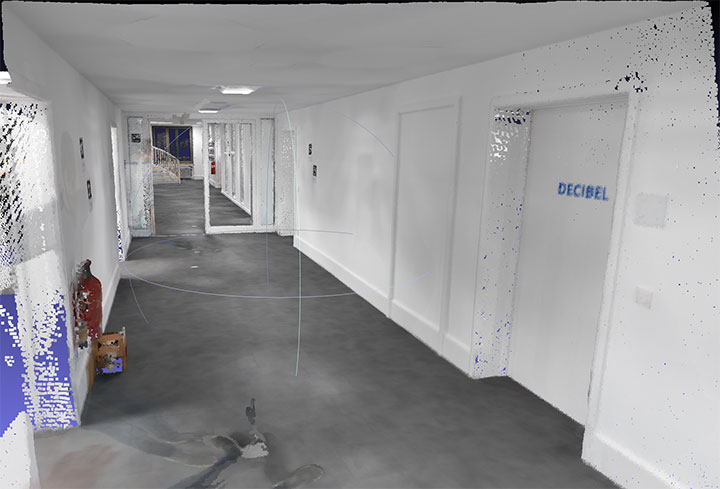
The same scan, cleaned up.



