
Since at least 2014, Google has been working on the Cartographer system for indoor 3D mapping. This system includes proprietary 3D-mapping hardware, as well as the software that processes the sensor data into maps. This week, the company announced an open-source release of the most important part of that software: the real-time LiDAR SLAM library.
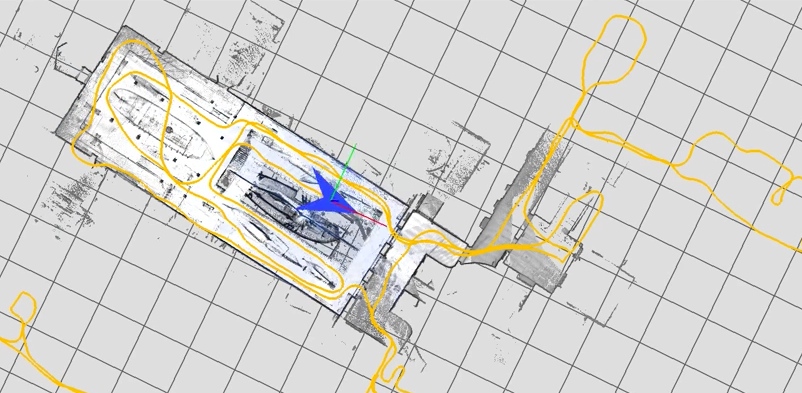
SLAM (Simultaneous Localization And Mapping) enables accurate mapping where GPS localization is unavailable, such as indoor spaces. SLAM algorithms use LiDAR and IMU data to simultaneously locate the sensor and generate a coherent map of its surroundings.
Companies like GeoSLAM use the same technology, but different algorithms, to power their own indoor scanning solutions. As Google notes, these kinds of algorithms are a crucial part of many cutting-edge technologies. The list includes such hot topics as autonomous cars, autonomous drones, and even devices like robotic lawn mowers and forklifts.
But there’s more to the announcement.
Alongside the SLAM algorithms, Google is releasing three years of LiDAR data it used for testing. The company is planning to add support for more kinds of sensors, but also localization for a device within a pre-existing map, and “lifelong mapping.”
Lifelong mapping is a potentially game-changing solution that corrects a deficit in existing SLAM algorithms. The current approach doesn’t support “long-term autonomy” because it has no way to calculate environmental change. The device maps the space once, and then it’s done. Lifelong mapping, on the other hand, updates SLAM algorithms so that an autonomous device can estimate the likelihood of a feature in its environment remaining static or moving.
This enables “lifelong environmental modeling in an ever-changing world.”
Lifelong mapping could put constant survey and asset change detection within reach of anyone with a 3D-mapping robot. With Google’s SLAM algorithms now out in the wild and open for use, that might be you someday soon.



